Detachable Modular Robot capable of Cooperative Climbing and Multi Agent Exploration
Abstract
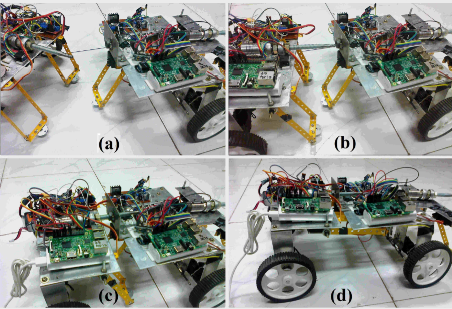
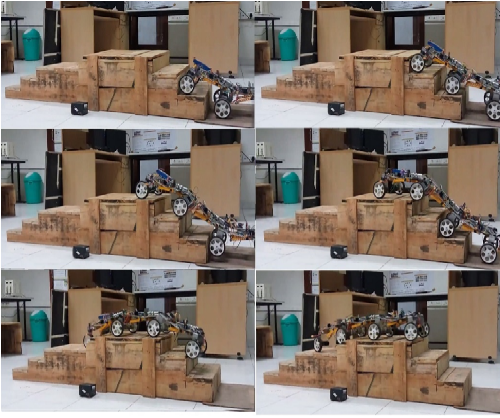
At the cross section of the fields of Uneven Terrain Navigation and Multi Agent Systems (MAS), in this work, a Detachable Compliant Modular Robot (DCMR) which can perform concurrent scene exploration by detaching into numerous parts, while preserving its ability to climb stairs is proposed and built. A spring is designed and used in the modular robot taking the worst-case-scenario of stairs encountered in an urban setting. In addition to the actuators at the wheels, an additional set of actuators per module are introduced to enable the detachment and re-attachment. The design additions and their trade-offs are discussed. Potential applications are presented with special focus on improving coverage of a map with obstacles/slabs large enough to merit exploration by climbing them. The problem of turning in crammed spaces is solved using the ability to detach of DCMR. The detaching & re-attaching capability, and stair climbing of the composite modular robot are demonstrated through experimentation using the prototype.